The last of the posts on the Hug avoider and the 4Tronix's Eggbit
In this post using the buttons and adding (via Microbit V2 with its speaker) simple speech
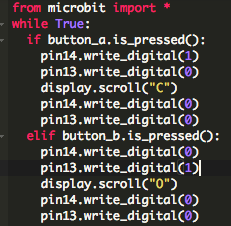
1. Buttons
Pins for the buttons
- pin8 - Green button
- pin12 - Red button
- pin14 - Yellow button
- pin`6 - Blue button
if pin12.read_digital()==1:
#Red Button
blank_it()
if pin8.read_digital()==1:
#Green button
startingMessage()
if pin14.read_digital()==1:
#Yellow button
rainbow()
if pin16.read_digital()==1:
#Blue botton
display.show(Image.ASLEEP)
2. Speech
mess1 = [
"This is the hug avoide",
"please keep back",
]
# Take from https://microbit-micropython.readthedocs.io/en/latest/tutorials/speech.html
for line in mess1:
speech.say(line, speed=120, pitch=100, throat=100, mouth=200)
sleep(500
3. Overall
from microbit import *
from machine import time_pulse_us
import neopixel, speech
sonar =pin15
sonar.write_digital(0)
fireled=neopixel.NeoPixel(pin13,9)
def rainbow():
fireled[0] = (255, 0, 40)
fireled[1]= (255,165,0)
#block=yellow
fireled[2] = (255,255,0)
#block=green
fireled[3] = (0,255,0)
#block=blue
fireled [4] = (0,0,255)
# block=indigo
fireled[5] = (75,0,130)
# block=violet
fireled[6] = (138,43,178)
#block=purple
fireled[7] = (255,0,255)
fireled.show()
def blank_it():
for j in range(8):
fireled[j] = (63, 0, 0)
fireled.show()
def howfar():
sonar.write_digital(1)
sonar.write_digital(0)
timeus=time_pulse_us(sonar,1)
echo=timeus/1000000
dist=(echo/2)*34300
sleep(100)
return dist
def startingMessage():
mess1 = [
"This is the hug avoide",
"please keep back",
]
# Take from https://microbit-micropython.readthedocs.io/en/latest/tutorials/speech.html
for line in mess1:
speech.say(line, speed=120, pitch=100, throat=100, mouth=200)
sleep(500)
def buttonplay():
if pin12.read_digital()==1:
#Red Button
blank_it()
if pin8.read_digital()==1:
#Green button
startingMessage()
if pin14.read_digital()==1:
#Yellow button
rainbow()
if pin16.read_digital()==1:
#Blue botton
display.show(Image.ASLEEP)
while True:
buttonplay()
dist=howfar()
if dist>30:
pin2.write_digital(1)
pin0.write_digital(0)
display.show(Image.HAPPY)
else:
pin2.write_digital(1)
pin0.write_digital(1)
blank_it()
speech.say("back away please", speed=120, pitch=100, throat=100, mouth=200)
display.show(Image.ANGRY)
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
 This is the second of a planned occasional series of posts on playing with some of the current AI specific add-on processors for Intenet of ...
This is the second of a planned occasional series of posts on playing with some of the current AI specific add-on processors for Intenet of ... You don't need to buy a robot to get programming a robot, now there are a range of free and relatively simple to start with robot simula...
You don't need to buy a robot to get programming a robot, now there are a range of free and relatively simple to start with robot simula... In an earlier post I played with 4Tronix's CrumbleBot to make an edge follower robot ( http://robotsandphysicalcomputing.blogspot.co.uk/...
In an earlier post I played with 4Tronix's CrumbleBot to make an edge follower robot ( http://robotsandphysicalcomputing.blogspot.co.uk/... In previous post I looked at a few on-line robot simulators (see links below) Programming VEX Code Programming iRobot Simulator Programming...
In previous post I looked at a few on-line robot simulators (see links below) Programming VEX Code Programming iRobot Simulator Programming... Popular Posts Moving Eyes with an Adafruit Adabox kit One of the things I enjoy is a subscription to Adabox from Adafruit, ...
Popular Posts Moving Eyes with an Adafruit Adabox kit One of the things I enjoy is a subscription to Adabox from Adafruit, ... It is not physical but CBiS Education have release a free robot arm simulator for Scratch. Downloadable from their site http://w...
It is not physical but CBiS Education have release a free robot arm simulator for Scratch. Downloadable from their site http://w... In the previous blog posts for this 'series' "It is a good time...." Post 1 looked at the hardware unpinning some of...
In the previous blog posts for this 'series' "It is a good time...." Post 1 looked at the hardware unpinning some of...